- +44(0)1332 291972
- convertme@convert-av.com
TaCT is a next generation IoT platform. A tracking and communication technology, which addresses the billions of devices requiring location, medium bandwidth, long range and a communication capability. TaCT combines a low power LoRa® network with native geo-location capability, where any IoT tag or sensor on the network can be geo-located.
Assets can be located both indoors & outdoors, across multiple floors, buildings and sites on the same network. Intelligent asset tags (i-Tags) can send and receive condition and status information via TaCT’s secure data channel.
All the usual server and security features of a LoRaWAN® network are implemented in the TaCT system.
Uniquely, the TaCT sensor network uses LoRa® modulation at 2.4GHz, with both location and sensor data being transferred to cloud/server-based application services via any standard Sub-GHz Network/Gateway.
This patented platform, functioning as a unified ‘dual frequency network,’ optimises and leverages the value already invested in existing Sub-GHz infrastructure.
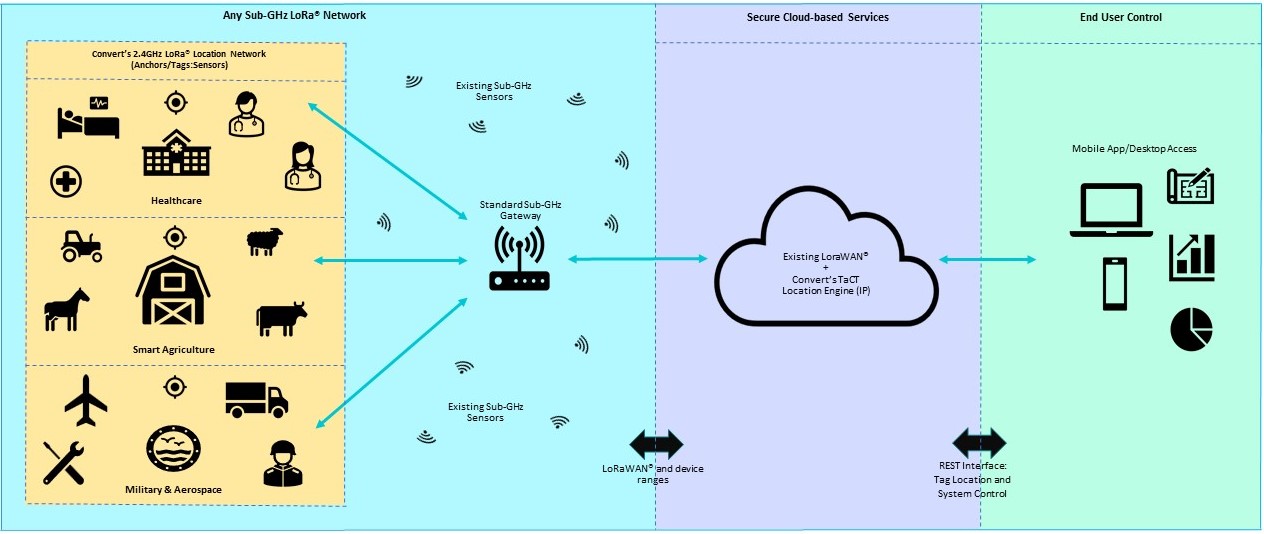
Convert’s dual frequency approach allows customers to leverage existing IoT installations in original Sub-GHz form.
This flexible network approach utilises well established standards in design, with a high level of security at its core. Spread spectrum modulation provides high interference immunity across this highly scalable architecture.
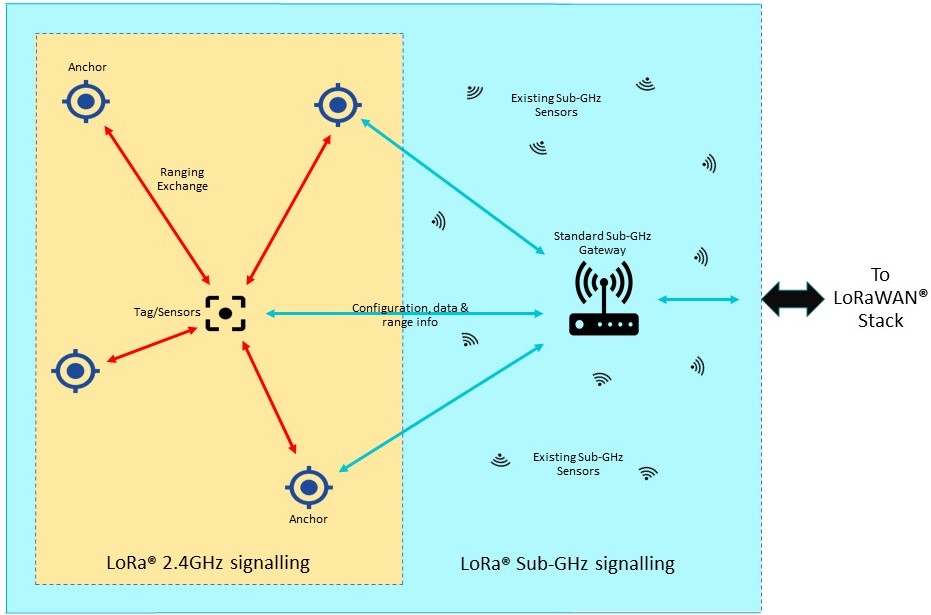
A single Sub-GHz network provides backhaul/configuration through a Sub-GHz gateway. Anchors and tags support location via 2.4GHz signalling between nodes.
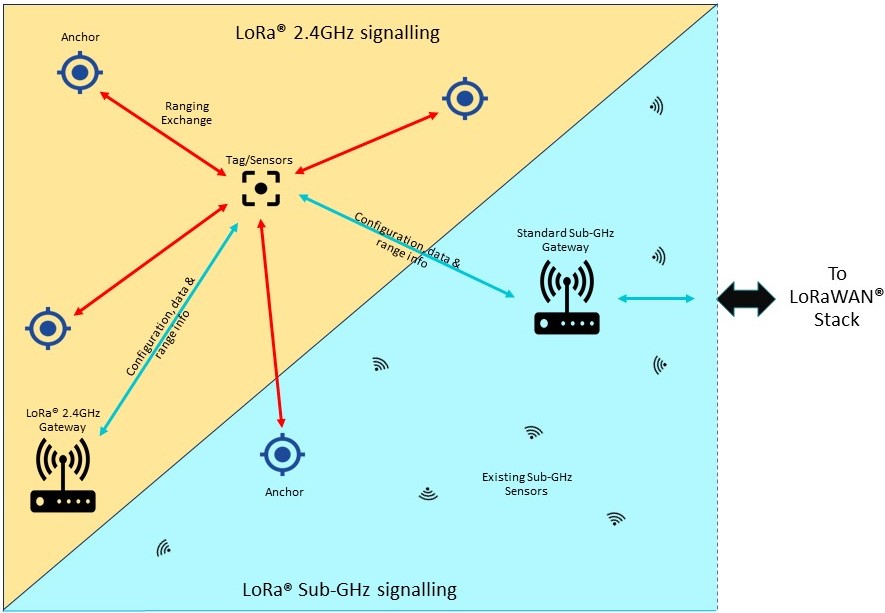
Tags and anchors operate at 2.4GHz and Sub-GHz with separate 2.4/Sub-GHz gateways providing backhaul capability at different rates/ranges.
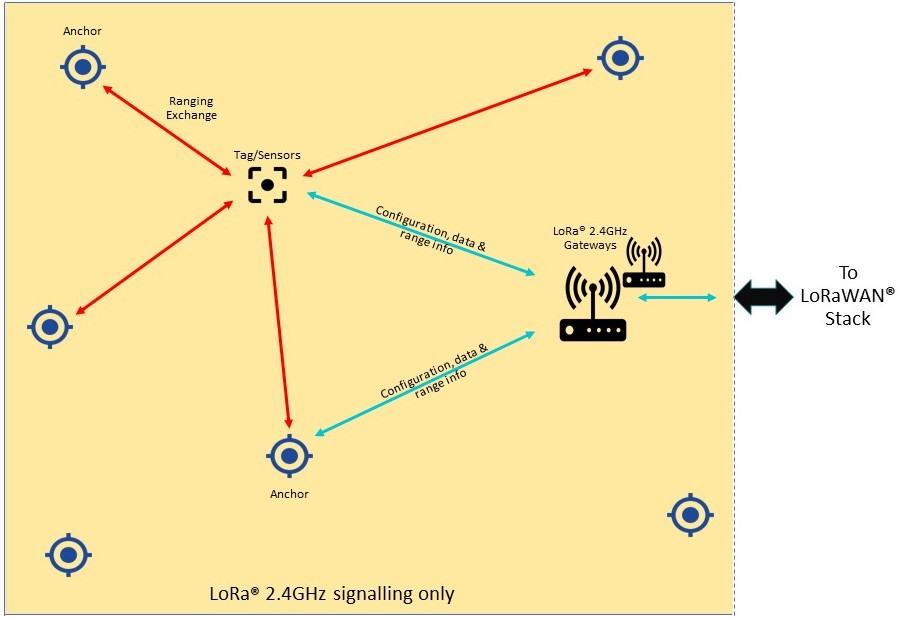
Tags, anchors and gateways all operate at 2.4GHz to provide location and data backhaul.
Deploying a TaCT system with geo-location is easy and cost-efficient.
Over-the-air updates (OTA) covers all software and hardware, with the TaCT control App being updated via Google Play.
Anchors are required for systems that implement geo-location. The anchors are placed at known positions in the area to be monitored and are used to provide round trip time of flight ranging (RTToF) information from themselves and tags/sensors in the system. The ranging data is sent to the application server, which uses the ranges of the tag from several anchors to compute the location of the tag.
Tags are specialised sensors designed to be mounted on equipment or people and provide location as their primary purpose. Sensors provide some other data or function as their primary purpose and can be located if required. The same radio component is used in both tags and anchors.
The physical distance between anchors, gateways and tags is determined mostly by the operating environment. Outdoors in line of sight, location is possible with greater than 500m between components. With a 500m effective range, large areas can be covered with small quantities of fixed infrastructure, making the system very cost efficient. Indoors the range is dependent on building construction and materials.
Accuracy depends on the number of anchors with good line of sight to the tag. Placing anchors, so that four or more anchors have line of sight, will produce the best result. Many indoor location projects do not require 1-2m accuracy. For instance, locating hospital or industrial equipment only needs room level, or 4m localisation accuracy. Once in the locale, it is easy enough to find the equipment. Reducing fixed infrastructure requirements will significantly reduce installation and operation costs. The TaCT localisation algorithm has been engineered to produce good location accuracy with reduced levels of fixed infrastructure, often producing good results with only one or two fixed anchors per space/zone.
Please contact us for a demonstration of what can be achieved.
Integral to our location reporting system design and general thought processes, is our extensive analysis on power consumption in our tags during standby and ranging, helping us to determine the trade-offs between accuracy, location rate and power consumption / battery size. We would be happy to share this information with you via a dynamic / parametric (easy to use) spreadsheet, the output of which will provide you with an overall power estimation based on the following variables/inputs:
We can then quickly estimate the service life of the battery in hours, days and years. Our calculations are backed up by extensive real-World test and verification to provide a genuine prediction of system performance.
Remove the guesswork from your battery life calculations by getting in touch with us now, to analyse your own specific use cases and networks

The TaCT location software uses a unique technique for reducing the effect of multipath reception on the RTToF ranging results. The LoRa® modulation allows the ranging signals to penetrate farther into buildings than other low power radio location systems. This combination of low power, long range and multipath reduction makes TaCT more cost effective to deploy because of the lower number of anchors required for a given area. TaCT does not require finger printing of the operating environment like BTLE and WiFi systems, so is quicker to install and does not require regular maintenance to keep the system accurate.
TaCT is a globally available, next-generation IoT solution, operating as a ‘unified dual frequency network’ (2.4GHz and Sub-GHz ISM bands). TaCT has an operating range of up to a few km, with link channel bandwidths of up to 200kbps. The TaCT network is capable of coexisting with WiFi and BTLE devices sharing the same radio space, enabling new IoT, M2M, smart-home, sensor networks, and industrial automation applications. The technology allows private single, or multi-user networks to connect to multiple end applications, with either local, or remote network and application servers.
Connect devices that are up to 2km apart, and penetrate into buildings without requiring a mesh network.
All data transferred, encrypted and secured using end to end 128bit AES encryption. Secure remote firmware update is supported.
TaCT connections can uplink through multiple gateways, allowing larger deployments for applications like large scale asset tracking.
TaCT devices offer native geolocation.
Low deployment costs, low cost gateways and long battery life for deployed devices, combine to give a low total cost of ownership.
The TaCT evaluation kit is quick and easy to install, and includes everything required for you to make an evaluation of the TaCT platform. The evaluation kit includes the software for the join, network and applications server running in the cloud, a TaCT gateway, eight TaCT anchors and a variety of (up to 4) tag combinations.